
New hybrid vehicle detection technology
As a new development direction of the automotive industry, Hybrid Electric Vehicle (HEV) has received the attention of the state. Hybrid vehicle technology to avoid the lack of a pure electric vehicle battery technology and energy infrastructure, become the focus of recent research and development of new vehicles. After the support and development of the National "863 Program", China's hybrid vehicle technology is rapidly moving towards industrialization.
1 Hybrid control system
There are three key factors in the realization of a hybrid vehicle: a system that can monitor the running status of the vehicle in detail; analyze the information acquired by the monitoring system and issue corresponding control commands; the electronic control system of the hybrid vehicle works in the vehicle compared to the general electronic system. In a very harsh environment, electromagnetic interference, vibration, dust, etc. will cause technical bottlenecks, as shown in Figure 1.

In this paper, the hybrid vehicle is studied, the core technology of each important component of the hybrid vehicle is systematically analyzed, and an economical and practical design example of the control system of the hybrid vehicle is proposed. The system adopts advanced computer technology and bus technology, integrates intelligent control, signal acquisition, data processing and communication, and has good real-time control. It realizes intelligent control of the whole vehicle and effective integration between multiple sensors.
2 power control strategy system
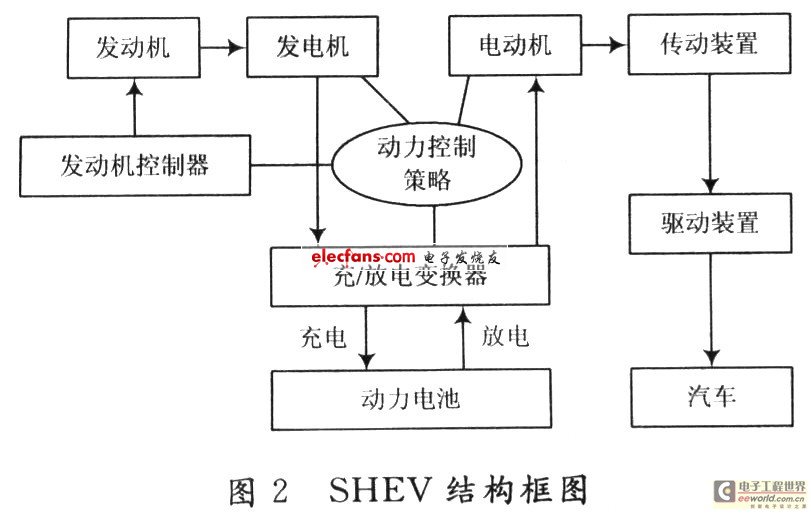
Hybrid electric vehicles are powered by engines and batteries. Engines and motors can be combined in different ways to achieve different drive options, such as series, parallel and hybrid. The performance of the vehicle is not only related to components such as the engine and the motor, but also related to its control strategy and optimization method. Hybrid electric vehicles can be divided into series hybrid electric vehicles (SHEV) and parallel hybrid electric vehicles (PHEV) according to the power combination. The research object in this paper is SHEV. The characteristics of SHEV are suitable for frequent starting, acceleration and low-speed operation conditions in urban driving, which can make the engine run stably around the best working point. By adjusting the output of the battery and the motor to achieve the purpose of adjusting the speed, thus improving the complex working conditions. The fuel economy of the vehicle under driving while reducing emissions. When the state of charge (SOC) of the battery is high, the engine can be turned off, and only the motor is used for power output, so that the engine can be prevented from operating under idle speed and low speed conditions, improving engine efficiency and reducing harmful substances. The structure of SHEV is shown in Figure 2.
Hybrid vehicles need to determine their corresponding control strategies based on different driving conditions and real-time parameters of the power battery. The "Power Control Strategy System" analyzes and processes the data from the health monitoring system to determine whether the motor should be in the engine operating mode, the power battery operating mode, or the cooperative operating mode, and then issue corresponding control commands. Studies have shown that a good system control strategy should be to operate the engine at 50% to 65% of its maximum load, while also taking into account the power of the car. An important basis for strategy control is the SOC value of the power battery. When the SOC value is in the normal working area (30% to 75%), the power battery discharge current is in the range of 20 to 65 A. If the driver accelerates the vehicle at this time. Below 30%, a power battery can be used to drive the vehicle. When the driver's request for acceleration is 30% to 65%, the excess energy released by the engine at this time can be used to charge the power battery. When the driver's request for acceleration is 65% to 80%, the car is independently driven by the engine until its maximum output power. When the acceleration requirement is greater than 80%, the vehicle can be driven simultaneously by the engine and the power battery.
In addition, it is necessary to consider the safety and life of the power battery. When the SOC value changes beyond the above range, it is necessary to issue corresponding control commands in a timely and reasonable manner. When the SOC is greater than 80%, the power battery is forced to discharge, and the control system needs to change the proportion of the power mixture at this time, and increase the ratio of the power battery to the total output power. At this time, the rich energy generated by the engine is not recovered. When the SOC is less than 20%, the power battery enters the forced charging mode, at which time a part of the output power of the engine is used for charging the power battery, and the vehicle is completely driven by the engine at this time.
3 signal channel
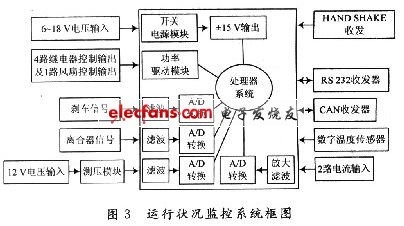
The processor system processes the collected signals and sends them to the upper power strategy control system, and the upper control signals are also transmitted to the bottom layer. This system uses two CAN transceivers to accomplish this task. Adopting CAN bus technology, it is not only free networking, strong scalability, good real-time performance, high reliability, but also has self-diagnosis and monitoring capabilities. It is a very effective communication method. The CAN bus has the following features:
(1) Bus arbitration based on priority competition without damage;
(2) can be transmitted by means of receiving filtered multi-address frames;
(3) It has error detection and error frame automatic resend function;
(4) Data transmission methods can be classified into data broadcast type and remote data request type.
In addition, the system also has a RS 232 transceiver, mainly used for debugging during the design process and quality inspection during the production process.
Dmx Led Bar 2722 is dmx512 rgb led lighting, width is 27mm and height is 22mm. DMX LED Bar 2735 is dmx512 rgb led lighting, width is 27mm and height is 35mm. We offer rgb led bar dmx lighting, similiar with american dj lighting or RC lighting, the LED Pixel Bar is Color Changing Light Bar. Led Rgb Bar , led rgbw bar is available. pixel bar have 1 led light bar, 2 led light bar, 3 led light bar, 6 Led Light Bar. It's dmx512 programming, the address have two type, one is auto address, another is manual address. That's to say we have led bar auto and led bar manual. Auto led bar, you don't need assign dmx address, it's convenience for event show and led light rental. Manual led bar, you need assign dmx address by Address Writer before light up, for DJ club, architecture light, it's ok. Maybe you want to know how to install a led light bar, don't worry, we have bracket, so that you can fix the bar easily. Regarding color changing led light bar, you can control by Led Controller.
Photo show of DMX LED Bar:

Dmx Led Pixel Bar,Dmx Led Bar,Dmx Light Bar,Led Rgb Bar
Shenzhen Iseeled Technology Co., Ltd. , https://www.iseeledlight.com