
An efficient and practical solution for on-chip knock detection of engine
An efficient and practical solution for on-chip knock detection of engine
Engine knock and control
In modern engine management systems (EMS), knock control is one of the core algorithms. Because frequent knocking can damage the engine, the ECU must take measures to stop knocking. To avoid knocking, the ignition advance angle can be set conservatively. But this sacrifices power and fuel efficiency performance at the expense of the best ignition timing. By adding the knock control function, the engine can adjust the ignition time in real time. It can gradually speed up the ignition timing to provide greater power. When knocking is monitored, the ignition timing only jumps back a few degrees to eliminate knocking. Generally speaking, the knocking system can improve power by about 3% and fuel economy by 5%.
The biggest challenge of knock control algorithm is to achieve effective knock detection. Because it is not easy to distinguish knocking from the normal noise of the engine quickly and accurately (such as within one thousandth of a second), it is usually done with a special ASIC. However, the functions of MCU are becoming more and more powerful. In system design, MCU is required to complete accurate knock detection while controlling the engine, the purpose is to reduce costs and improve system reliability. A typical MCU, such as Freescale's Copperhead (MPC5554), has a powerful digital signal processing capability in its core that can handle various knock detection algorithms.
Standard method of knock detection
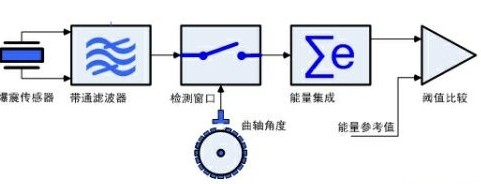
Detonation occurs at the beginning of the power stroke (the time after the compression stroke piston moves to the highest point (TDC)). We not only know the approximate frequency of knocking resonance (approximately 7K and its harmonics), but also the approximate crankshaft angle range in which knocking occurs. Figure 1 is a standard knock detection block diagram based on this principle. A commonly used knock sensor encapsulates a piezoelectric ceramic to convert the monitored engine running sound into an electrical signal. The electrical signal from the knock sensor passes through a band-pass filter. The band-pass filter extracts the required frequency signal. An angle window is generated based on the crankshaft angle signal, and this window covers the period during which knocking may occur. In this way, the signal output from the detection window is selected in both the time domain and the frequency domain, and the knock signal we are interested in. In order to judge the intensity of knocking, the most direct method is to add the absolute value of the signal, that is, energy integration. By comparing the energy-integrated data with the preset knock energy reference value, it can be determined whether knocking has occurred.
On-chip knock detection scheme based on Monaco

Freescale has launched Monaco (MPC563xM), the first 90-nanometer technology series dedicated to low- and mid-end EMS applications. Monaco is a 32-bit microprocessor based on the Power Architecture. Many of its on-chip peripherals and linkage logic design fully consider the need for knock detection. The effective configuration of these peripherals can effectively implement various knock detection schemes. For relatively simple knocking algorithms, once the CPU initializes these peripherals, they can even operate autonomously, no longer requiring real-time CPU intervention. Even for more complicated knocking algorithms, these peripherals can complete most of the work, greatly reducing the CPU's computational load. Figure 2 is a structure diagram of a typical on-chip knock detection scheme based on Monaco. The figure shows all the peripherals and logical connections related to the knock function. The input of the ADC has four bias resistors with configurable resistance and a variable gain amplifier (VGA), which are used to maximize the dynamic range and compensate for changes in the output signal amplitude of the engine sensor.
Sampling of knock signals
Monaco's ADC supports sampling frequencies up to 1MHz and sampling accuracy of 8, 10 or 12 bits. In this example, 200K @ 12bit is selected. One characteristic of the periodic interrupt timer (PIT) on Monaco is that it can be configured not only as a periodic interrupt, but also as a periodic direct trigger for on-chip EQADC. In this example, the PIT period is set to 5us and the AD conversion is triggered, so an accurate 200kHz AD conversion trigger signal is obtained.
Detonation can only occur within a certain angle window (a period of time later in TDC), so just let the ADC work in the proper window. This window is generated by eTPU. eTPU is a RISC engine independent of the core. In Monaco, eTPU is tightly combined with 32 timing channels, focusing on complex and highly real-time timing logic. Its most important function is to generate the angle reference of the engine operation according to the input pulse signal of the crankshaft and camshaft. In this way, the EMS control algorithm can be based on the angle space, and eTPU also provides angle-based fuel injection and ignition control functions. Freescale provides complete eTPU microcode and comprehensive library functions for users to use. This includes the generation of knock windows: at different engine speeds, the desired angle-based windows can be given in real time for different cylinders.
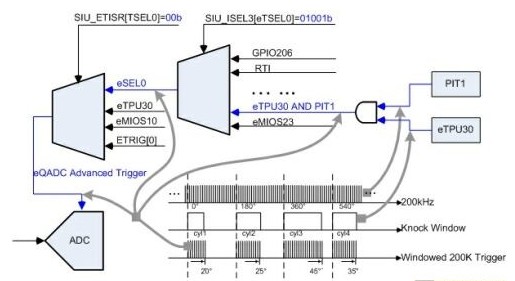
The linkage logic between Monaco's on-chip peripherals allows the ADC to support advanced external trigger modes. Figure 3 describes how to generate the AD trigger signal and related signal waveforms inside the MCU. Monaco's EQADC integrates a parallel interface (PSI), and the knocking digital signal can be directly delivered to the on-chip hardware digital filter (DecimaTIon Filter) through PSI. A significant benefit of using PSI is that no CPU intervention is required during the filtering process.
Hardware digital filter
The core of the hardware digital filter is the hardware multiplier and adder (MAC). The default input sample point accuracy is 16 bits. The hardware digital filter can be set to an 8th order finite impulse corresponding filter (8th FIR) or a 4th order infinite impulse filter (4th IIR) through software. The hardware digital filter has 9 24-bit coefficient registers, which respectively store 8 filter coefficients and 1 constant term. The accumulative result accuracy of the MAC unit reaches 51 bits. In this example we designed DecimaTIon Filter as a 4th IIR low-pass filter with a cutoff frequency of 16kHz. The hardware digital filter also supports sub-sampling of the filtered signal with a sub-sampling rate from 2: 1 to 16: 1. The purpose is to reduce the load on subsequent CPU processing. In this example, 4: 1 is selected, and a signal with a cutoff frequency of 16kHz is sufficient with a sample rate of 50k, and does not need to be as high as 200k.
Signal processing engine
The signal processing engine (SPE) is part of the kernel and has powerful mathematical operations. SPE has various flexible multiply and multiply-add instructions, and supports single instruction multiple data (SIMD) function, which can complete two 32-bit multiply-add operations (MAC) in each system clock. Freescale provides a complete DSP library for high-level calls, including commonly used FFT, IIR and FIR operations. In the application of advanced knock detection, FFT is often used for more elaborate frequency domain analysis. In this example, a 6th IIR is used to implement a band-pass filter to extract knock signals. The cut-off frequency of the band-pass filter is set at 9kHz and 15kHz. The final energy integration is also done by SPE, which only involves addition and simple correction of the result. The load required by the entire knock detection CPU is less than 3%.
It should be pointed out that DMA plays two important roles in the implementation of this knock detection solution: it is responsible for carrying the EQADC commands stored in the system RAM to the CFIFO in real time; the data is transferred to the hardware digital filter after low-pass processing. It is temporarily stored in the system RAM, and an interrupt is generated after the data of each knock window is moved. The CPU calls the band-pass filtering of SPE in the interrupt service routine.
Summary of this article
Freescale's new generation of Monaco series MCUs for low- and mid-end EMS applications integrate high-efficiency on-chip knock detection capabilities. For the application of knock control, the Monaco series not only retains the powerful digital signal processing capabilities of the classic Power Architecture, but also further optimizes the on-chip peripherals and the linkage logic between each other. Both the more sophisticated advanced knocking algorithms and the more straightforward knock detection are suitable for implementation on Monaco.
Shareconn development co.,Ltd is leading manufacturer in China, we develop and manufacture SMA, MCX, Mini BNC, N type,FAKRA automotive Rf Connectors,audio&Video Connectors and so on.
Our RF Connectors use for RF Cable Assemblies and PCB mount. audio&video connector application for Cable Assembly
and PCB mount.




Connectors
Male Connector,Female Connector,Right Angle Connector,SMA Right Angle Connector
Shareconn Development CO.,LTD , http://www.share-conn.com